基本资料
江晓玲 讲师,博士,硕士生导师 
博士师从加拿大皇家学会会士、加拿大机器人国家机器人与自动化领域研究主席Clément Gosselin教授,曾参与加拿大自然科学与工程基金(NSERC)支持的探索型科研项目,研究方向为绳索驱动并联机器人。自硕士研究生以来一直从事绳索并联机器人的研究至今,共发表论文11篇,其中SCI期刊论文收录5篇。在基于动力学约束的高速、大变位姿的轨迹规划领域,以第一作者发表SCI期刊论文4篇,包括机器人领域顶级期刊IEEE Transactions on Robotics论文3篇,ASME Journal of Mechanisms and Robotics论文1篇。参加高水平的国际学术会议并做分组报告4次,其中ASME IDETC/CIE会议2次,本领域CableCon专题会议1次。
主要研究方向
绳索驱动并联机器人是采用绳索代替刚性连杆驱动的一种机器人,具有结构简单、运动速度快、工作空间大、承载能力强等优点,在高速摄影(Skycam)、天文观测(大射电望远镜FAST)、虚拟现实、医疗康复等领域发挥着重要的作用。
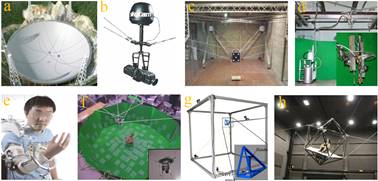
图1 绳索驱动并联机器人的应用实例:(a)FAST, (b) Skycam, (c) CoGiRo, (d) 三维打印机构,(e)上肢外骨骼,(f)三维扫描机构,(g)力触觉机构,(h)运动模拟器
● 方向1:绳索驱动并联机器人动力学、轨迹规划研究
规划动力学约束下的高速、大变位姿轨迹,使动平台能够在可控的情况下延伸至静力学工作空间以外,拓宽绳索驱动并联机构的应用范围。
(1) 变频率轨迹设计:在给定的路径上,设计变频率的轨迹。
(2) 点到点插值轨迹设计:针对一系列的目标点,设计点到点的插值轨迹。
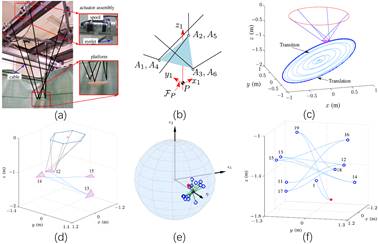
图2. 六自由度悬挂型绳索并联机器人轨迹规划:(a)样机,(b)动平台原理图,(c)周期轨迹,(d)位姿插值,(e)姿态插值,(f)位置插值
● 方向2:绳索驱动并联机器人在物理人机交互中的控制研究
针对绳索驱动的康复、助力等物理人机交互(Physical Human-robot interaction,pHRI)系统,研究主动柔顺控制方法,完成机器人与人或外界环境之间的交互任务。
(1) 阻抗控制方法研究。
(2) 导纳控制方法研究。
获奖情况
讲课比赛,7003全讯白菜网,一等奖,2019年
科研项目
1. 国家自然科学基金青年项目,高速、大变位姿绳悬挂并联机器人动力学轨迹插值的解析方法研究 51805486,28万,2019.1~2021.12,排名1
2. 国家自然科学基金面上项目,水下狭窄空间探测的仿河狸爬游式机器人稳态游动机理及实现方法研究 51875528,60万,2019.1~2022.12,排名2
3. 浙江省自然科学基金青年项目,基于Grassmann-Cayley代数的并联机构误差建模与分析方法研究 LQ19E050015,10万,2019.1~2021.12,排名2
4. 浙江理工大学科研启动基金项目,六自由度绳悬挂并联机器人的动力学轨迹规划 18022109-Y,8万,2018.4~2021.3,排名1
发表论文
期刊论文
(1) Xiaoling Jiang; Eric Barnett; Clément Gosselin, Periodic trajectory planning beyond the static workspace for six-DOF cable-suspended parallel robots, IEEE Transactions on Robotics,2018, 34(4): 1128~1140.
(2) Xiaoling Jiang;Eric Barnett; Clément Gosselin, Dynamic point-to-point trajectory planning beyond the static workspace for six-DOF cable-suspended parallel robots, IEEE Transactions on Robotics,2018, 34(3): 781~793.
(3) Xiaoling Jiang; Clément Gosselin, Dynamic point-to-point trajectory planning of a three-DOF cable-suspended parallel robot, IEEE Transactions on Robotics, 2016, 32(6): 1550~1557.
(4) Xiaoling Jiang; Clément Gosselin, Trajectory generation for three-degree-of- freedom cable-suspended parallel robots based on analytical integration of the dynamic equations, ASME Journal of Mechanisms and Robotics, 2015, 8(4): 041001(7 pages).
(5) Lewei Tang; Xiaoqiang Tang;Xiaoling Jiang; Clément Gosselin, Dynamic trajectory planning study of planar two-dof redundantly actuated cable-suspended parallel robots, Mechatronics, 2015.9, 30(3): 187~197
会议论文
(6) Xiaoling Jiang;Clément Gosselin, Dynamically feasible trajectories for three-dof planar cable-suspended parallel robots, ASME 2014International Design Engineering Technical Conferences and Computers and Information in Engineering Conference(ASME IDETC/CIE 2014), Buffalo, NY, USA, 2014.8.17-2014.8.20.
(7) Xiaoling Jiang; Clément Gosselin, Dynamic transition trajectory planning of three-dof cable-suspended parallel robots, Proceedings of the Third International Conference on Cable-Driven Parallel Robots, Québec, QC, Canada, 2017.8.2-2017.8.4
专利情况
无
联系方式
● 浙江省杭州市浙江理工大学23号楼408室
● Email: jxl1212@zstu.edu.cn




 师资队伍
师资队伍